专题报道 | 智能机器人:软轴驱动的柔性机械手
在上一篇“柔性咽喉手术机器人”中,我们介绍了机器人系统在咽喉癌手术中的作用,这次我们要介绍的是机器人系统的关键部件之一——机械手,那么它又在哪些领域有应用价值?在研发过程中又有哪些问题?
什么是机械手?
机械手是指可以实现类似人手功能(比如抓取物体、操作工具)的机器人部件,一般作为机器人系统中的末端执行器。它是机器人与环境相互作用的最后环节和执行部件,其性能的优劣在很大程度上决定了整个机器人的工作性能。
现如今,机械手的应用范围不仅仅局限于工业机器人,物流分拣、科研探索、社会服务等各个领域都需要智能可靠的机器手。
然而在复杂环境中对未知的目标物完成抓取任务,这对于机械手来说是一个很大的挑战。传统的刚性机械手受困于复杂且脆弱的机械结构、精密昂贵的传感器以及复杂的控制算法等问题,以及现有的大部分机械手存在功能单一、抓取范围有限、使用和维护成本高等问题从而在使用中受限。而柔性材料在简化机构设计、提高适应能力、降低成本方面有着独特的优势,因此将柔性材料引入机械手设计可以很好地解决这些问题。
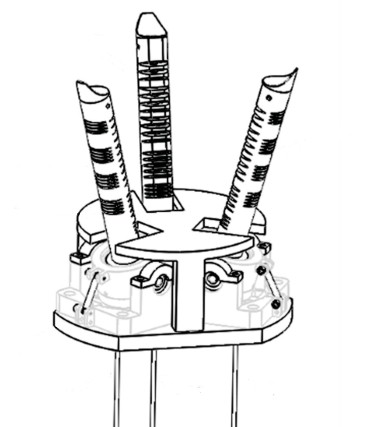
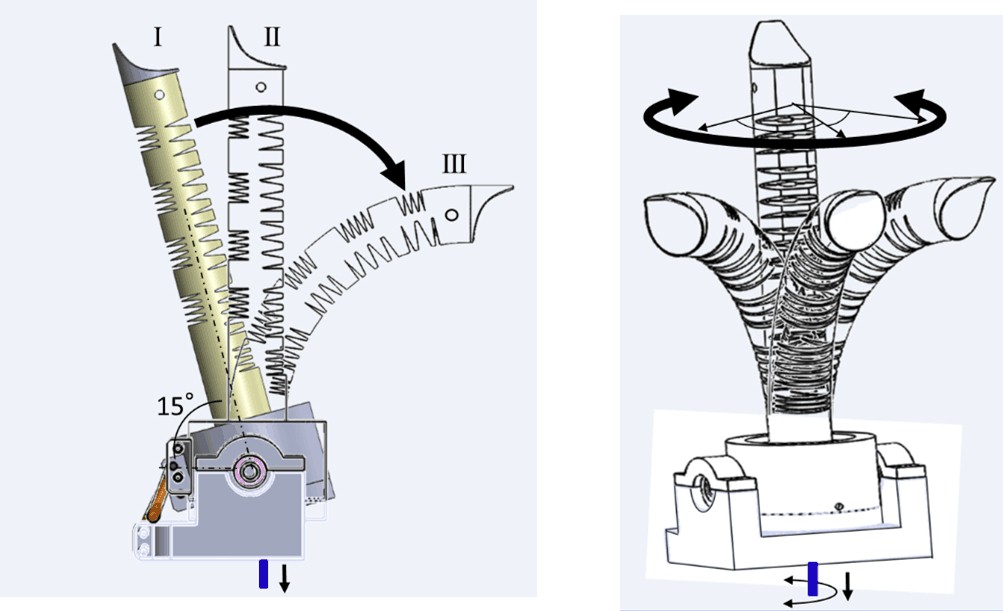
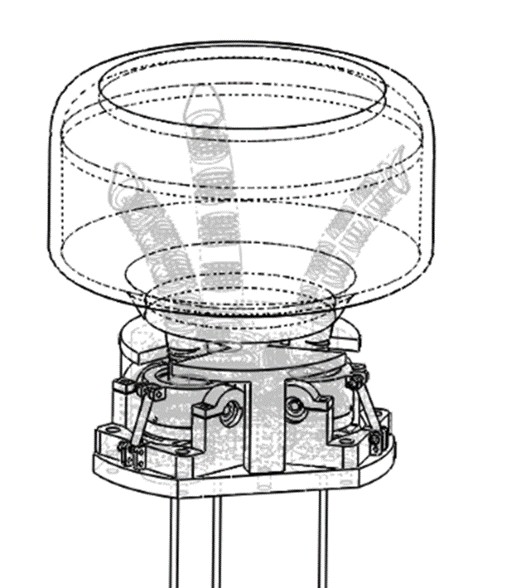
图1 柔性机械手及柔性手指
新加坡国立大学苏州研究院任洪亮教授课题组为此研发了软轴驱动的柔性机械手
▼

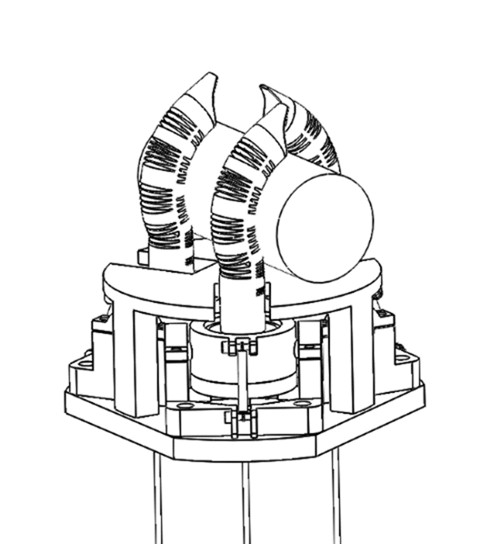
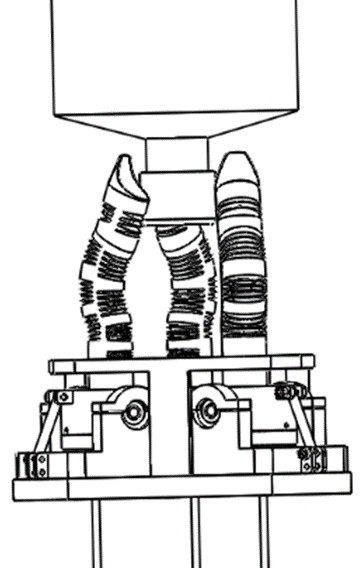
此设计有两大亮点:一是机械手包含三根柔性手指,手指主体是将柔性材料(NinjaFlex)通过3D打印技术打印而成,灵活性好、加工时间短、成本低;二是软轴的使用,相比于传统的绳驱方式,软轴不仅可以传递拉力,使手指产生弯曲动作从而抓取目标物(见图1),而且可以传递扭矩,驱动手指主体绕着手指底座转动。在软轴驱动下,每根手指灵活度更大,功能性更强。如图2所示,得益于手指主体的柔性及灵活性,本设计中的机械手可以在没有精密传感器的情况下,利用简单的控制程序就能够稳健地抓取不同形状、不同质量的目标物,并且能够在机械手底座不动的情况下以不同的姿态抓取同一目标物,极大地提高机械手抓取的灵活性。除了稳健的抓取能力,此设计中的机械手还能在底座被固定且没有额外自由度的情况下完成对目标物的扭转操作,例如从瓶子上拧松瓶盖并且取下来(如图3所示)。因此,此机械手还可以用于更多的场景,比如操作旋钮、在水下等危险环境中开关阀门等等。
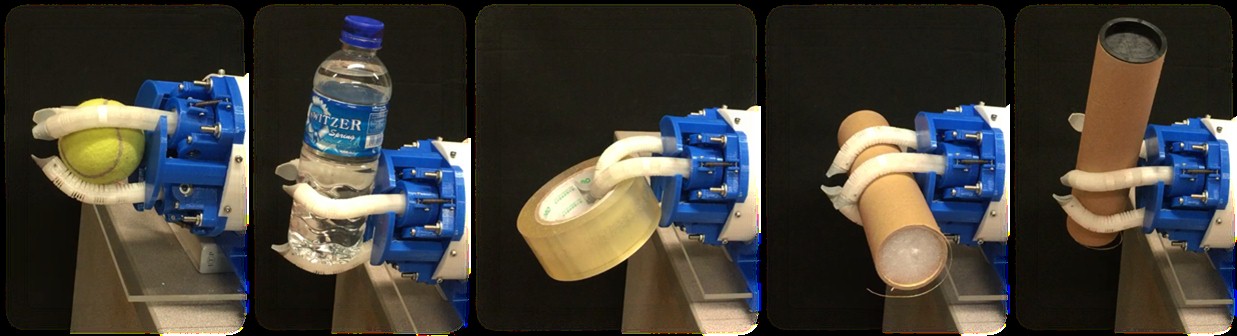
图2 抓取演示
此设计把柔性材料及软轴加入到机械手的设计中,有效地简化了机械手的结构,降低了使用和维护成本,极大地提升了抓取稳定性和抓取范围,有效地增强了机械手的功能性,对于机械手的推广和普及有着重要的意义。
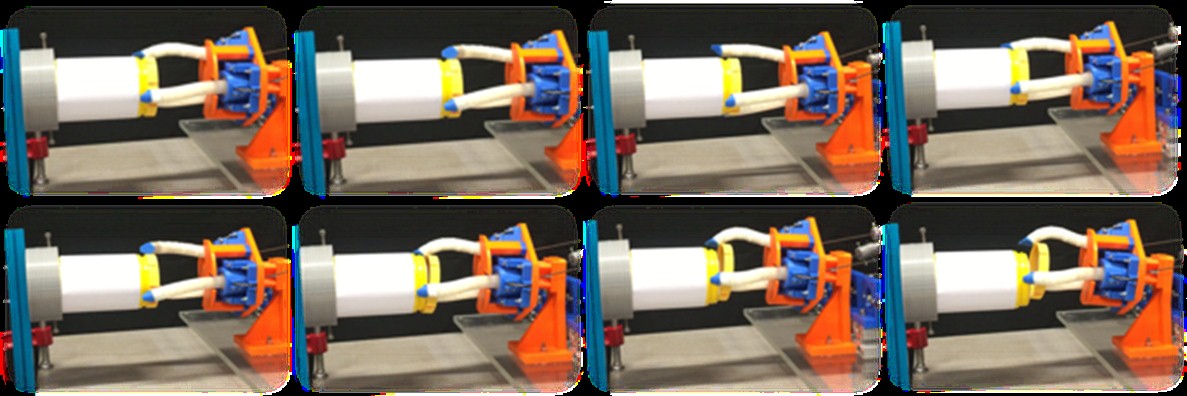
图3 拧瓶盖演示
供稿:兰慧文


