专题报道 | 智能机器人:绳驱模块化变关节机械手
在“柔性咽喉手术机器人”以及“软轴驱动的柔性机械手”两篇中,我们了解到机械手一方面可以代替人类完成准确抓取、精细操作,另一方面可以在危险、复杂及非机构化的环境中工作,可以在工业生产、物流分拣、家庭服务及科学探索等领域发挥重要作用。为了实现抓取操作的多样性,机械手对于驱动方式和形状有较高的要求。
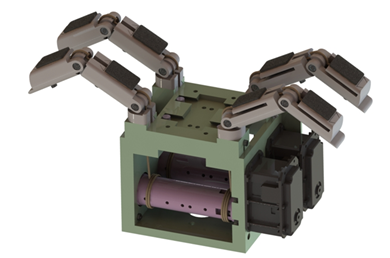
新加坡国立大学苏州研究院任洪亮教授课题组的李长胜博士和博士生顾晓艺设计的绳驱模块化机械手
最传统的方式是把电机安装于关节位置,直接驱动机械手的运动,这种电机直接驱动的方式可以实现较好的控制性能,但由于机械手非常笨重,极大地限制了它的适用范围;基于绳驱的驱动方式可以使驱动部分脱离机械手本体,有效地减小机械手的体积,但是这些机械手具有固定的形状,难以胜任形状差异很大的目标物的抓取。此设计创新性地把模块化思想和变关节技术引入了机械手的设计,解决了模块之间的连接与配合、连接可靠性等问题,并设计研发了两款机械手,解决了上述的问题。
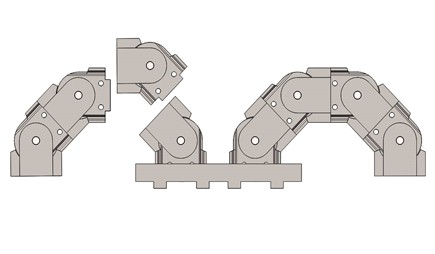
第一款机械手
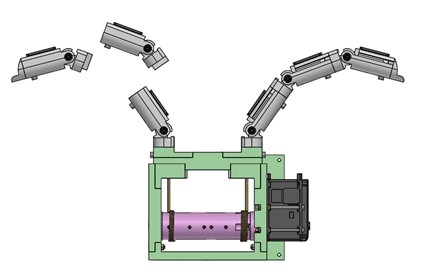
第二款机械手
第一款机械手,手指由精心设计的模块相互连接而成,旧的模块能够很方便地被新的模块替代,模块的数量也可以任意地增加或者减少,从而适用于不同的抓取任务。不仅如此,每个关节都能够主动地被锁止。机械手可以构成不同的形状完成特定的任务。不仅如此,研究者研发了一套智能控制算法,当机械手的模块与目标物完全贴合后,相应的关节会自动锁止,当手指与目标物完全贴合后,不需要额外的驱动力,机械手就能够实现抓取功能。因此可变关节技术不仅实现了机械手结构的多样化,提高了抓取能力,而且可以有效地保护驱动器,延长驱动器的使用寿命,降低了使用成本。

机械手可轻松抓起体积大且形状不规则的物体
第二款机械手同样采用了模块化的设计方法,不仅手指上的模块之间可以相互连接配合,手指与底座之间也采用了相同的连接配合技术。因此,通过调整手指的模块数量及调整手指在底座上的位置,可以实现对机械手工作空间和刚度的调整,从而使机械手的适用领域更广,抓取性能更好。不仅如此,此设计中的机械手在人机交互安全性及操作工具等方面也展示出了优越的性能。
机械手能够智能地识别目标物并施加合适的抓取力进行抓取易碎、表面光滑、脆弱的物体
得益于模块化和变关节这两个核心技术,此设计中的两款机械手的工作空间,形状和刚度都可重构,使它具有高度的灵活性和高的柔顺性,结合它的智能感知能力和自适应能力,本设计中的机械手的抓取能力更强,适用范围更广。同时,它的结构更简单,用3D打印技术就可以生产出来,从而生产周期短,生产和使用成本低,通用性更强。
人机交互
供稿:兰慧文


